TL072 Op-Amp model or any other Audio grade suitable op-amp
Explanation :
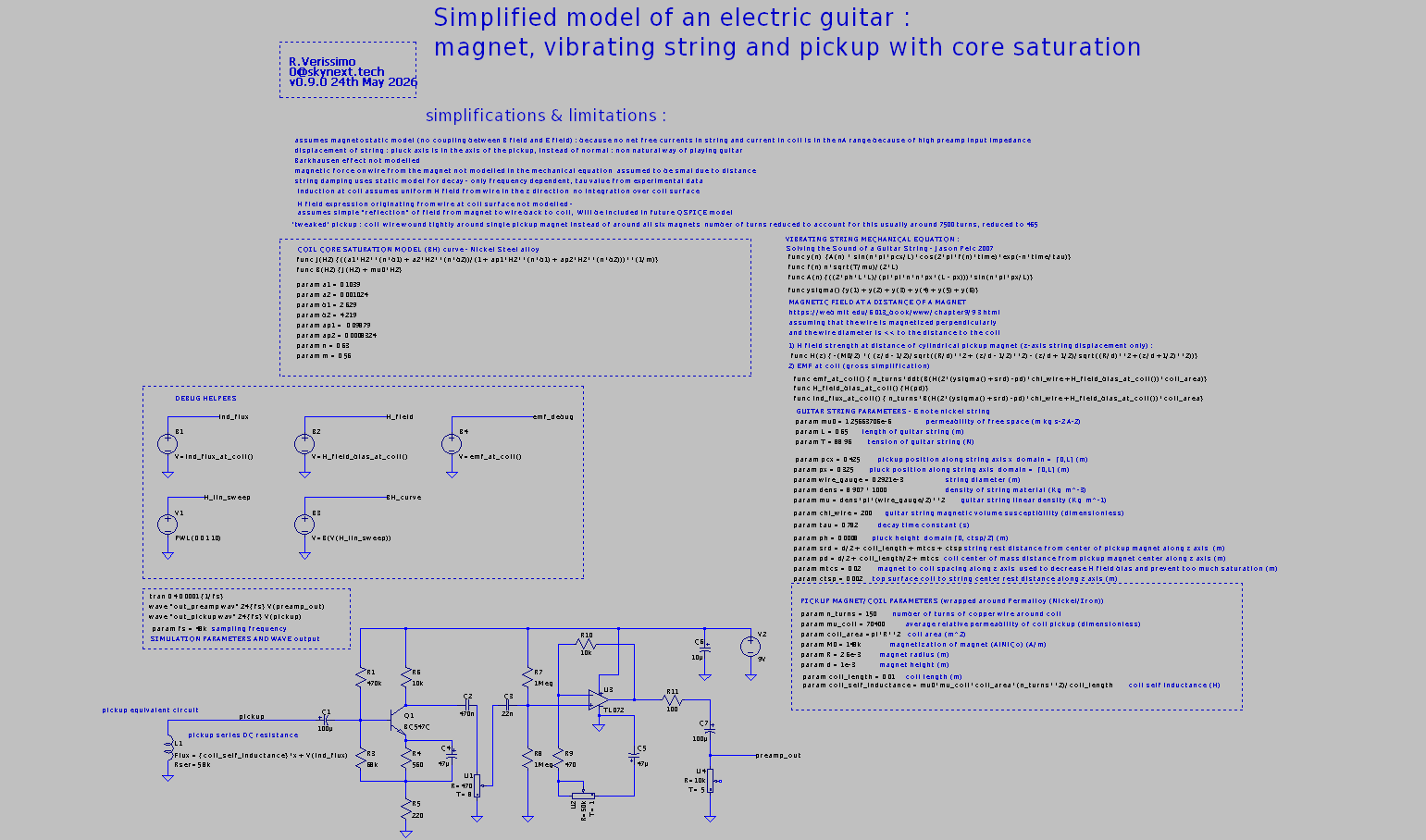
It assumes a single pickup with a copper wire wound around a Nickel Steel alloy core. Saturation is modeled.
In a realistic model, the magnetic excitation of the coil is as follows :
A) Magnet generates (magnetostatic equation) magnetic field. (2)
B) Vibrating string is magnetized. Creates a time varying magnetic field according to motion equations (1) & (4)
C) Time varying magnetic field is picked up by the coil wrapped around the pickup pole cores.
Because of the limitations of integration in Ltspice (time integral support, but not space integrals), the model of B) has been simplified – As if the magnet was vibrating like a string at a distance of the pickup, but taking into account geometry. A better model would be possible using “C++ black boxes” as it is possible now with QSpice, as the DLL engine is Turing complete which allows to render space integrals easily. The model of B) excited by A) is doable in QSpice and is explained in the paper (4). So B) has been simplified to a simple coupling parameter int the form of a factor “chi_wire” (or wire magnetic susceptibility).
Note that the code for such a model of B) has been explored as such, but not validated. It may be added here in a future release.
Finally the core Mechanical model is simplified and according to (1) :
It assumes a string displacement along the Z axis only, and bridge reaction is not modeled.
Bias magnetic field is modelled and as a notable contribution if the pickup core saturation is modelled.
Note that the coil is assumed to be wrapped around a single pole (as just one string is modeled), number of turns has been decreased to take into account the tighter magnetic coupling.
Pickup flux is the sum of self inductance times current + induced flux from time varying magnetic field. Since the preamp is very high impedance the current is negligible and only the EMF from the magnetic field has sensible contribution.
Finally a preamp has been added. (5)
References :
(1) Solving the Sound of a Guitar String Jason Pelc December 10, 2007 (Submitted as coursework for Physics 210, Stanford University, Fall 2007)
(4) Exact expression for the magnetic field of a finite cylinder with arbitrary uniform magnetization Alessio Caciagli 1, Roel J. Baars 1, Albert P. Philipse, Bonny W.M. Kuipers ⇑
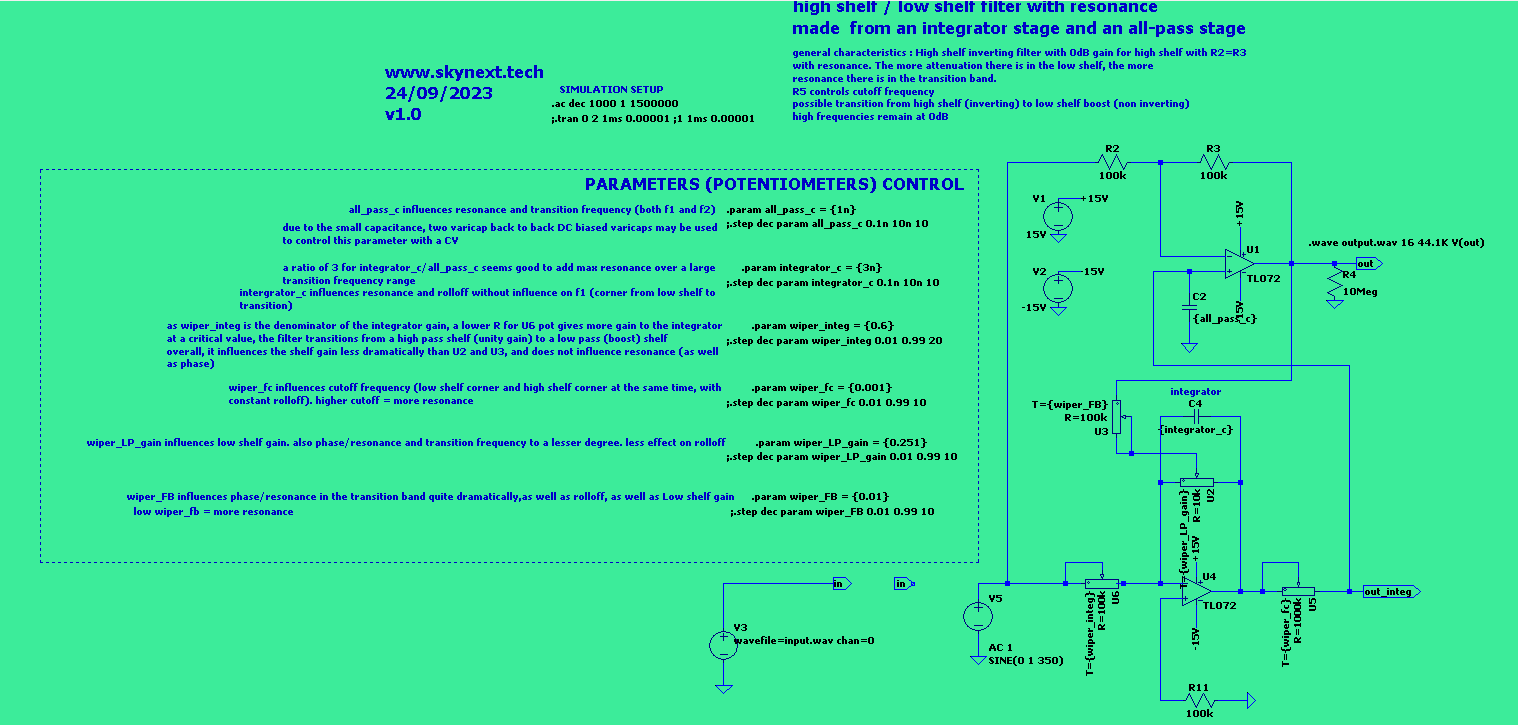
This shelving filter was obtained serendipitously by combining an op-amp integrator stage (bottom) with an all-pass filter stage (top). The top stage output is the filter output.
I have not done the analytical determination of the transfer function down to the resistance and capacitance of each component. If you wish to do so, This could be done either through FACT – fast analytical circuit techniques, or automatically with some Ltspice adjunct program like SLICAP.
Thus the behavior was mostly determined empirically by sweeping all resistances and capacitances, with resistances replaced by potentiometers.
It exhibits resonance. Most shelving filters do not exhibit this feature. It may be desired in some cases.
It can also switch between a high shelf and a low shelf behavior.
Control is a bit touchy as the filter shows a certain degree of inter-dependence with respect to some potentiometer effects. (Certain potentiometers affect several characteristics at once)
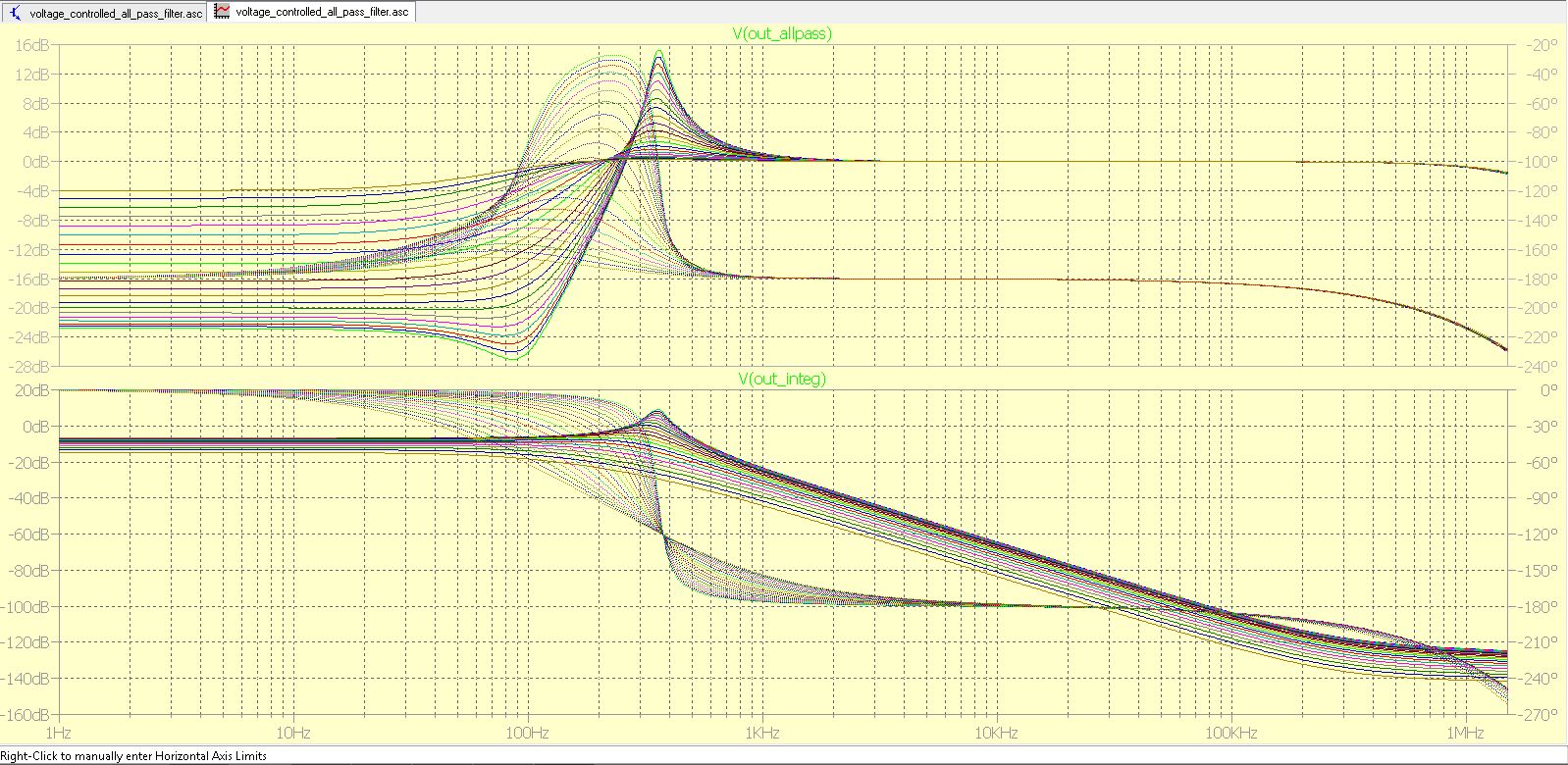
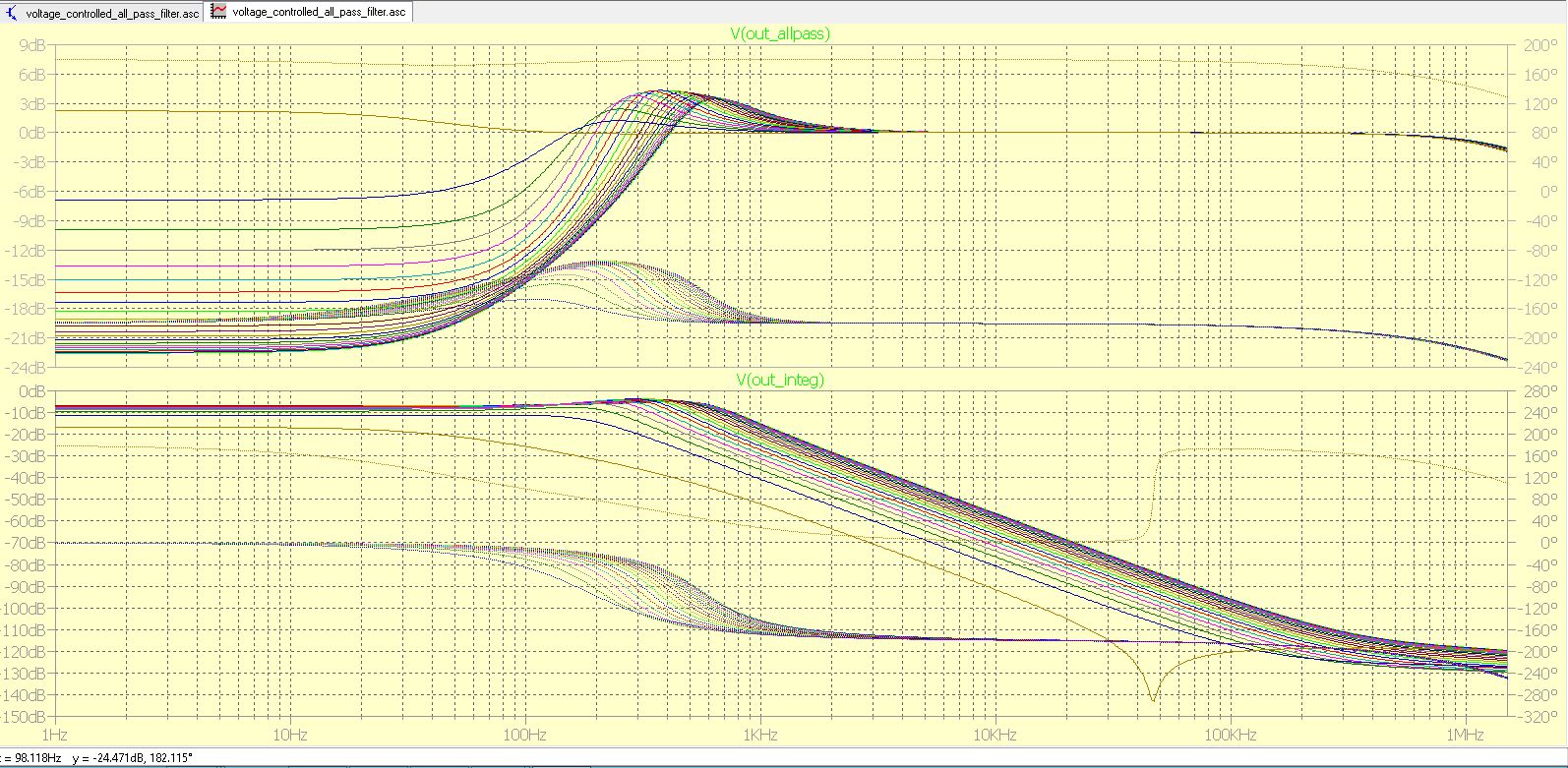
Schematicwiper_fb sweep – filter output is top graphwiper_LP_gain sweep – filter output is top graph
It requires the TL072 model for the op-amps.
There is a wave input if you wish to test it on a wave file. The filename is input.wav and the output filename is output.wav. Connect the “in” net instead of the V5 source and change the simulation to .tran
Don’t forget to set the transient analysis to the length of the input wave file.
The zip below contains the ASC file and some screenshots of the frequency response while stepping some potentiometers.
Thermionic is an FX VST3 Plugin. It is waveshaping in nature by applying a custom dynamic range compression followed by a single-ended triode amplifier. The single-ended triode circuit uses a SPICE algorithm to solve the circuit state. It can do both very low THD and heavy distortion/waveshaping effects.
The idea for this plugin came after designing this waveshaping compressor in LTspice. Then I thought that it would be cool to add a final triode stage.
Custom compression : The compression applies a linear-to-log conversion with an additional coefficient (parameter k) that alters the transfer function to provide varied waveshaping effects. Also, the knee effect can be tailored to provide distortion at the knee level. It is roughly the digital implementation of the LTspice knee-breaker compressor that I discussed in a previous post.
As for the triode implementation, it uses a classic 12AX7 single-ended configuration circuit. with AC coupling at the input and output stages for the default preset, with additional presets available. It features a cathode bypass resistor and capacitor, grid current emulation, and Miller capacitance.
The intrinsic triode parameters are based on Norman Koren’s model and allow the emulation of other models of triodes. Grid current is based on Rydel’s model. Non-realistic Vact parameter is added to start grid current distortion at an arbitrary voltage input level, disregarding biasing.
Since the state-based nature of the circuit, some parameter combinations may result in divergence and are non-recoverable, but it is rare, Some parameter combinations also require more CPU time to find a solution. So, it is advised to tread carefully when modifying parameters.
Saving a preset / restoring a preset is possible and the simulation should start all right but with a delay of a handful of seconds to obtain convergence.
abstol defines the SPICE solution tolerance and improves quality at the expense of more CPU load.
The plugin also features an experimental routing of the gain reduction to some triode parameters.
Additional features :
Oversampling from 0x to 3x.
Auto Make-up gain on/off with trimming.
Compressor / Triode bypass.
Compressor Stereo Linking On/Off.
Beta Caveats / Bugs :
Not all parameters are suitable for automation.
In some cases, when CPU load is high, switching on/off checkboxes and a StringListBox parameter, (for instance, Oversampling, GR Routing) may not be taken into account. If that happens, Please stop audio processing and change the parameter state, and then resume audio processing.
Tests :
To ensure a quality product, we will try to test the plugin in the most varied configurations, including a wide variety of OS and Hosts configurations. Most of the tests to date have been done on Renoise 3.41
We also plan to enroll users for beta testing. Nothing is better than field experience.
Release Date : To be announced, Probably June to August 2023.
Minimum OS/Software requirements :
Windows 8 to 11.
x64 OS.
A VST3 compatible host.
What about Mac users?
We envision a plugin for Mac users, but we need more time to port some functions.
Will there be a Demo version?
There will be a demo version available on our portal soon, to start the beta field testing phase. For now, there is a youtube video with a demo of the product for waveshaping applications.
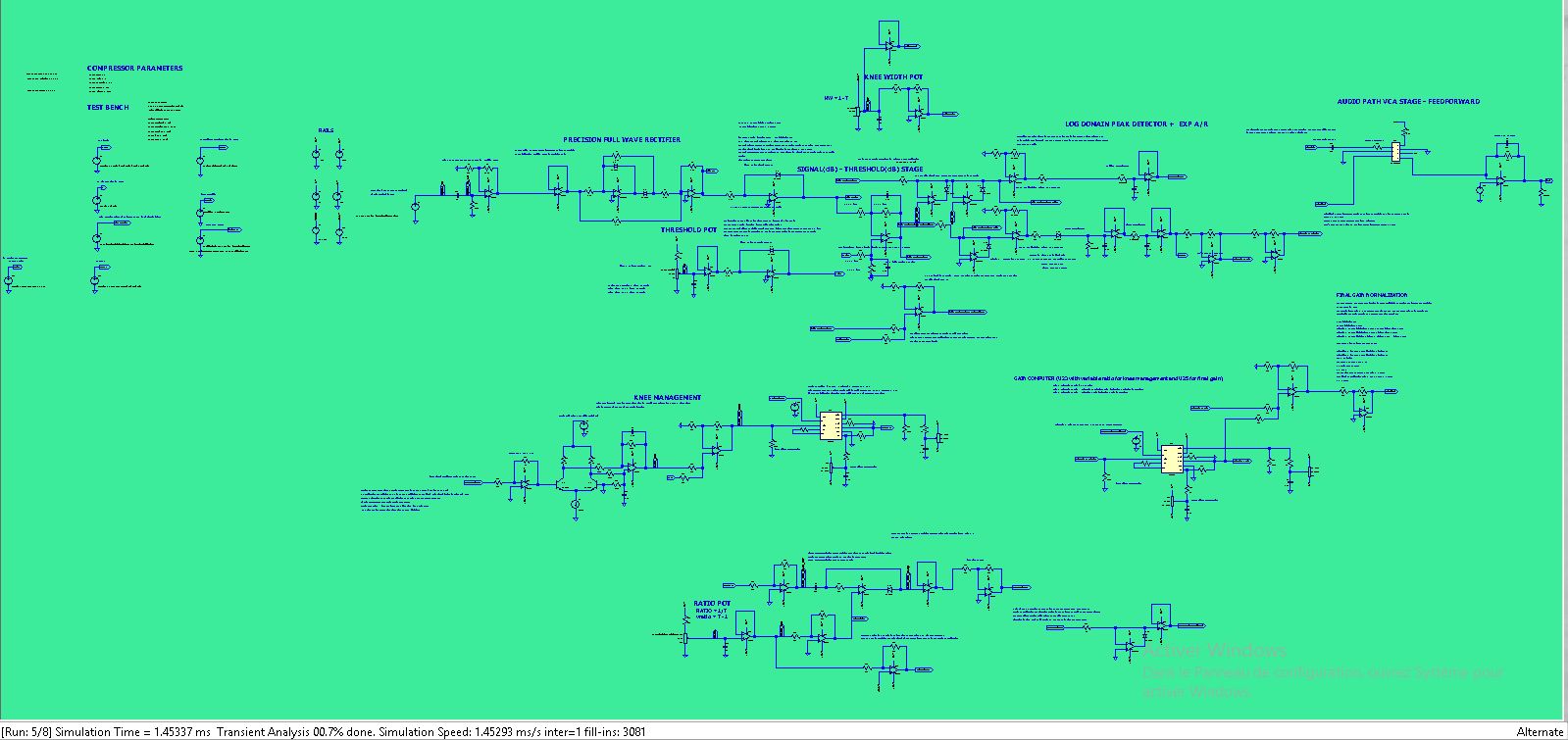
This post demonstrates a VCA-based compressor with a variable knee.
The methodology used to design this compressor was to draw no inspiration from existing VCA compressor design and rather start from compressor theory alone. The fact that I had no previous exposure to VCA designs and started with no previous experience in analog compressor design is a double-edged sword. On the one hand, it could end up with novel and unexplored means of achieving certain effects and sound coloration, On the other hand, it could lead to questionable choices or overly complicated designs. There is also a big risk of getting a design that works well “in silicon”, that is, running well in a SPICE simulator, but would offer subpar performance in any realistic implementation. I am mainly thinking about SNR characteristics.
An understanding of theory is indeed required to build a compressor that achieves its intended goal, dynamic range compression. The following paper is a good starting point :
[1] “Digital Dynamic Range Compressor Design— A Tutorial and Analysis” from Giannoulis, Massberg, and Reiss.
Our design however diverges quite fast from the standard gain computer architectures provided in the paper. Figure 7 of [1] introduces the basic configurations of gain computers and sidechain detectors.
Our design is a variant of the log domain detector, (7.c), in which the level detector comes before the gain computer. Since our level detector and A/R stages work on a log signal, and our A/R stages, being RC single pole filters exhibit exp. behavior in transient response, which means that the overall A/R envelope with respect to the linear domain is also linear (log and exp cancel out to give a linear envelope).
This is one thing.
The next divergence from a classic compressor is the knee implementation. Here we embarked in a really experimental direction. Usually, the knee is an amplitude band of the signal, in which the gain computer does not apply the full ratio. This bandwidth is called the kneewidth, centered around the threshold. At threshold – knee, the compressor applies a unity ratio, which means no compression. at threshold + knee, the compressor applies full ratio, that is the set compression.
The goal of the knee is to provide a smooth transition between these two extremes. When using high ratios which get close to limiting range, that is particularly useful.
Figure (4) of [1] shows the piecewise definition of the gain computer.
$$ 2(X_{g} -T) > W \Rightarrow T + \frac{X_{g} -T}{R} $$
(1) (2) and (3) form the piecewise definition of gain computer function.
This function in the knee zone uses a quadratic function to make the junction smooth. Making a smooth junction between two secant lines is a Bézier curve.
Our approach is experimental in the sense that it uses : the sidechain signal bounded between -W/2 and W/2 as the ratio modulator, further, it applies an attack/release to that bounded signal. To achieve proper results that A/R settings should not diverge much from the main peak detector A/R, or the time constants will lose correlation and the knee may be applied outside of the knee range or not at all. (ganged potentiometers would be required).
Furthermore, the processed knee control signal after the A/R range is passed through a tanh() function cell using a BJT differential pair. The resulting control signal does not guarantee smooth branching between the two gain lines and may induce undershoot/overshoot.
We expect it to introduce distortion in some cases and make the knee setting a complex task, however, it is interesting from an FX compressor point of view.
Most of the circuit complexity is found in the processing of the tanh cell signal to normalize it so the compressor acts as a compressor and does not expand the signal, and also provides no more than compression at ratio levels at the upper exit of the knee width zone.
Description of the knee control signal path.
As said before, we clip the log detector signal centered around the threshold between -w/2 and w/2. Then we apply a similar A/R envelope. Then we use U22 opamp to control the gain of the input signal to the tanh() cell. A stronger signal will result in a tanh output being more “square”
The output of the tanh() cell is then passed to a normalizer using a VCA824 (U41) that ensures the signal “tanh_norm” is constrained : “vratio_buf” < “tanh_norm” < 0V ) This assumes that the previous tanh() cell signal is well behaved : -0.5V < “tanh_out” < 0.5V if not, the following clamping stage will take care of unwanted excursions.
For normalization, we use a VCA824 IC to perform that function. This VCA is a linear domain VCA. It is designed for HF but should work well at audio frequencies. However, it would incur some additional costs in the final product. There is also the issue of input/output voltage offsets that require calibration.
Then we have a clamping stage for supplementary protection :
This clamps “tanh_out_gain_inv” output positive excursions to the “- vratio” level (positive value). positive excursions should not happen unless the tanh() cell current sink is above 247µA and the signal entering the tanh() cell makes the cell saturate. If that were to happen, “tanh_out_gain_inv” would go above “-vratio”.
Finally, We added a bit of extra precaution so that gain voltage “tanh_out_clamp2_clip_buf” fed to the U23 VCA824 never goes above 0V. tanh() normalization and clamping action is not perfect, as well as U41 VCA824 always has some offset despite calibration, so we clip above 0V here.
The result is our modulated ratio gain signal. We use another VCA824 (U23) to apply this ratio to gain_before_ratio_inv as a part of the gain computer architecture. The rest of the gain computer is a standard implementation.
Before the gain control signal is sent to the THAT2180 IC, it needs to be normalized so as to apply a 20(log10(x)) transfer function. This allows a simpler calibration when doing measurements.
A gain correction factor is done by U37, taking into account the gain factor of the THAT2180 and the transfer function of the diode linear to log signal converter that is situated at the start of the sidechain, after the full wave rectifier.
We use a high current, low output impedance op-amp for U37, as the THAT2180 requires a low impedance gain control signal.
Note that the threshold stage setting also uses a linear-to-log converter instead of a log potentiometer. The idea was to thermally couple the matched diodes D4 and D8 so that when there are temperature fluctuations, the threshold does not change much.
Use of the model :
Set the parameters.
“threshold” at 1 is -oo dB while 0 is 0dB “kneewidth” close to 1 is 0dB while 0 is +inf dB “ratio” is the compressor ratio. “attack” and “release” are resistance values of the attack/release stages. Higher attack resistance value -> faster attack (attack capacitor charges quicker) Higher release resistance value -> slower release (release capacitor discharges slower)
Choose the input source signal
Edit the B1 voltage source and specify the voltage source to use. the “1V” voltage source uses a low frequency (20 Hz signal) that allows seeing the action of the attack and release settings. there are also pulse/square waveforms, a triangle, and one using a wave file as input, do not forget to set the input and output waveform filenames to your requirements.
Load the waveform settings.
There are three waveform settings :
compressor_v0.9_monitor.plt: to compare input signal with compressor output.
compressor_v0.9_tanh.plt: to inspect the knee computer.
compressor_v0.9_gain_computer.plt: to inspect the gain computer.
Caveats / possible improvements :
The input AC coupling to both the sidechain and THAT2180 is sketchy. it could generate phase problems.
There is no makeup gain in this circuit.
There is no balanced input to unbalanced converters, nor unbalanced to balanced output.
However, adding these would slow even more the simulation which is already really slow on a dual Xeon E5-2430v2 ( between 50 and 100µs/s) When using a wave file. Expect 2.75 hours for 1 sec of simulation at this rate. However, using standard test bench inputs gets a much higher simulation rate. (in the 2 to 3 ms/s range)
The knee control signal (between U33 and U46 stages) is a bipolar signal, which means we have to discard the diode between this stage, to allow the signal negative excursions, This stage is no more a decoupled attack/release stage but simply a first-order LP filter. The time constant however is determined by the {release} parameter. and is the same as the A/R signal stage in our model.
The two parallel paths with different A/R parameters (one subjected to a full-fledged A/R while the other to a simple LP filter, plus the different amplitudes due to the knee width selection give overall a different signal profile at the attack vs at the release, even when using same resistor values for attack and release resistors. this gives rise while using certain knee settings to a different effective threshold at attack vs release. The symmetrical wave shape subject to this won’t be symmetrical anymore.
Wide knee widths give wide knee width signal amplitudes between the two clip values (-w/2 and w/2). In the case of small widths, the resulting signal fed to the tanh_out stage may not be sufficient to drive it to saturation. A better implementation would normalize this signal based on kneewidth. For now, one has to boost U22 gain for small widths to ensure saturation. Failure to do so would make the ratio stage fail to reach its target ratio.
Control of tanh() saturation by means of U22/R65 has a large influence on the application speed of the final ratio, which means its effect may “take over” the attack release characteristics of the classical A/R settings.
As a conclusion, using a tanh() cell was a questionable design choice if ease of use is a prime concern, but introduces interesting waveshaping effects (if applied to an instrument, with very fast attacks and releases)
it also allows knees ‘harder’ than no “knee”. The effect can be sought as a transition from a unity ratio to a ratio more than intended before a gradual recovery to the desired ratio. The precise reason for this behavior would require an in-depth analysis of the simulation and also a practical simulation to see if that can be reproduced. It could be useful to limit fast transients since at the crossing of the threshold a super hard knee would help to bring them in check before reverting to the desired ratio
I am posting the asc without the additional required components for copyright reasons.
Simulation Data
We will now show the compressor behavior before a full calibration is done on the output gain stage op-amp final amplifier, using theoretical values.
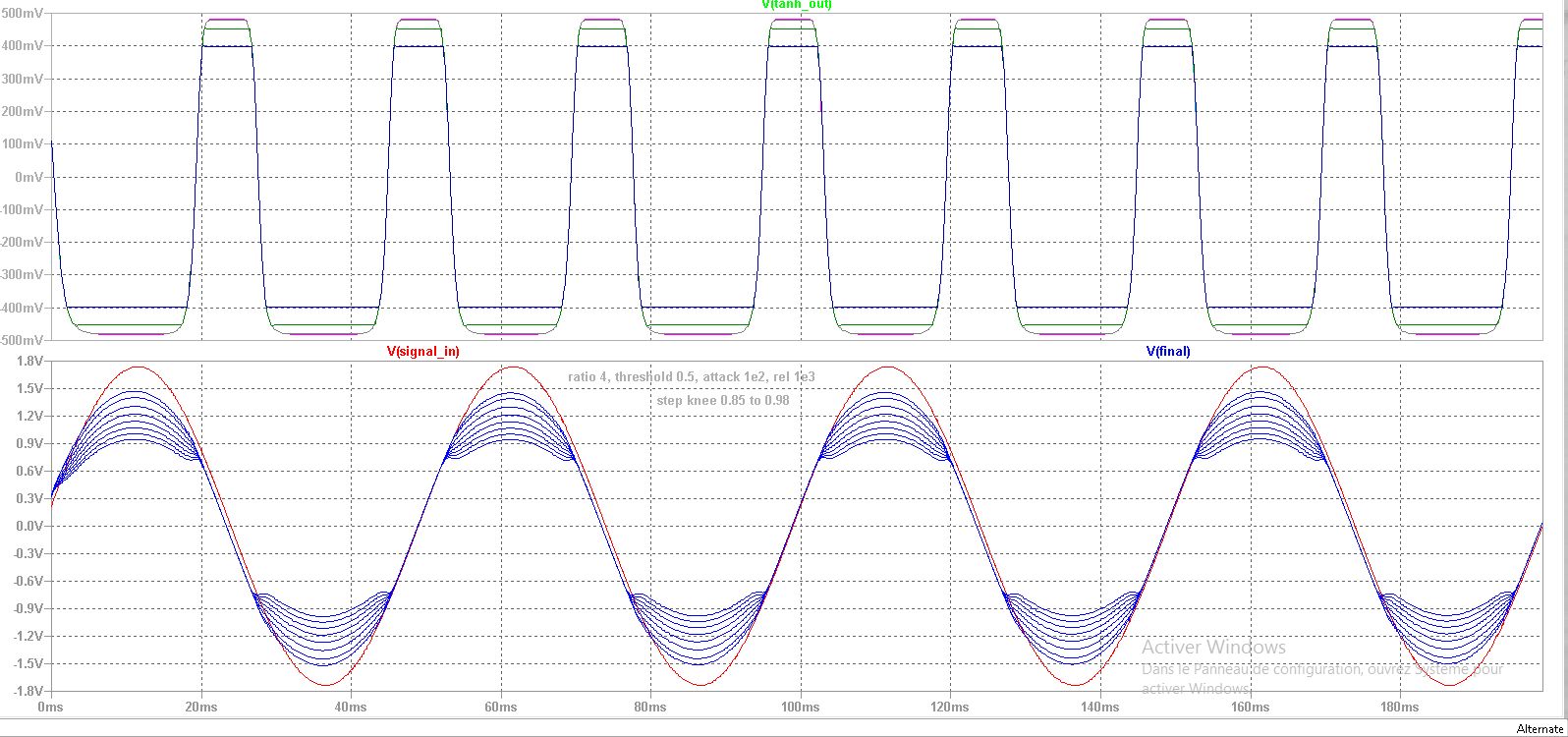
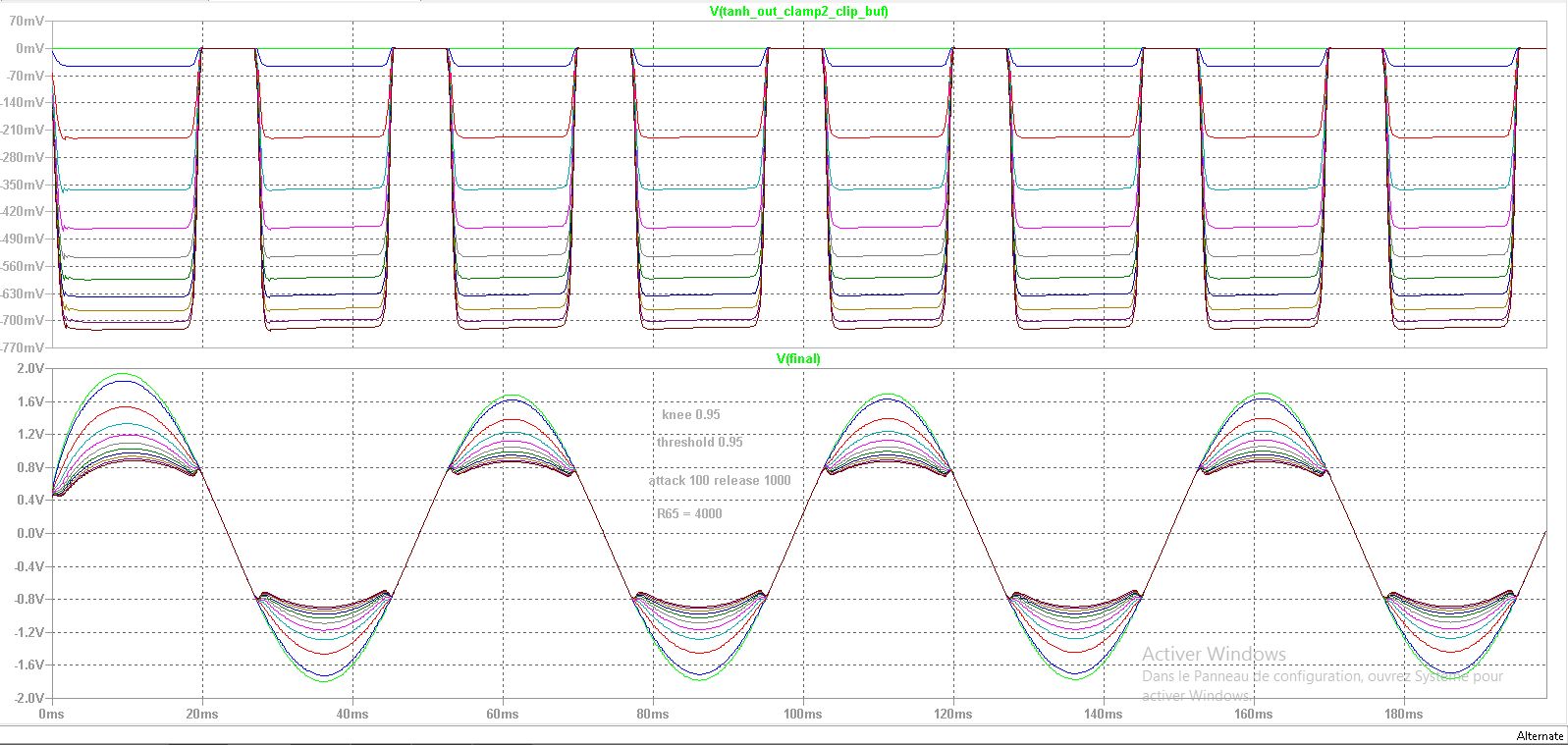
Figure 1 : This first plot shows a step of the parameter knee width with constant tanh() gain. for smaller widths, the tanh() cell fails to saturate and the full ratio is not applied. resulting in less compression. For larger widths, compression starts earlier in our design because the main gain computer applies the A/R envelope at (threshold – kneewidth/2), to this the distortion effects induced by the tanh() cell are compounded. overall it achieves more compression at larger widths. which is quite paradoxical.
Figure 1 : stepping the knee width, R65=2k
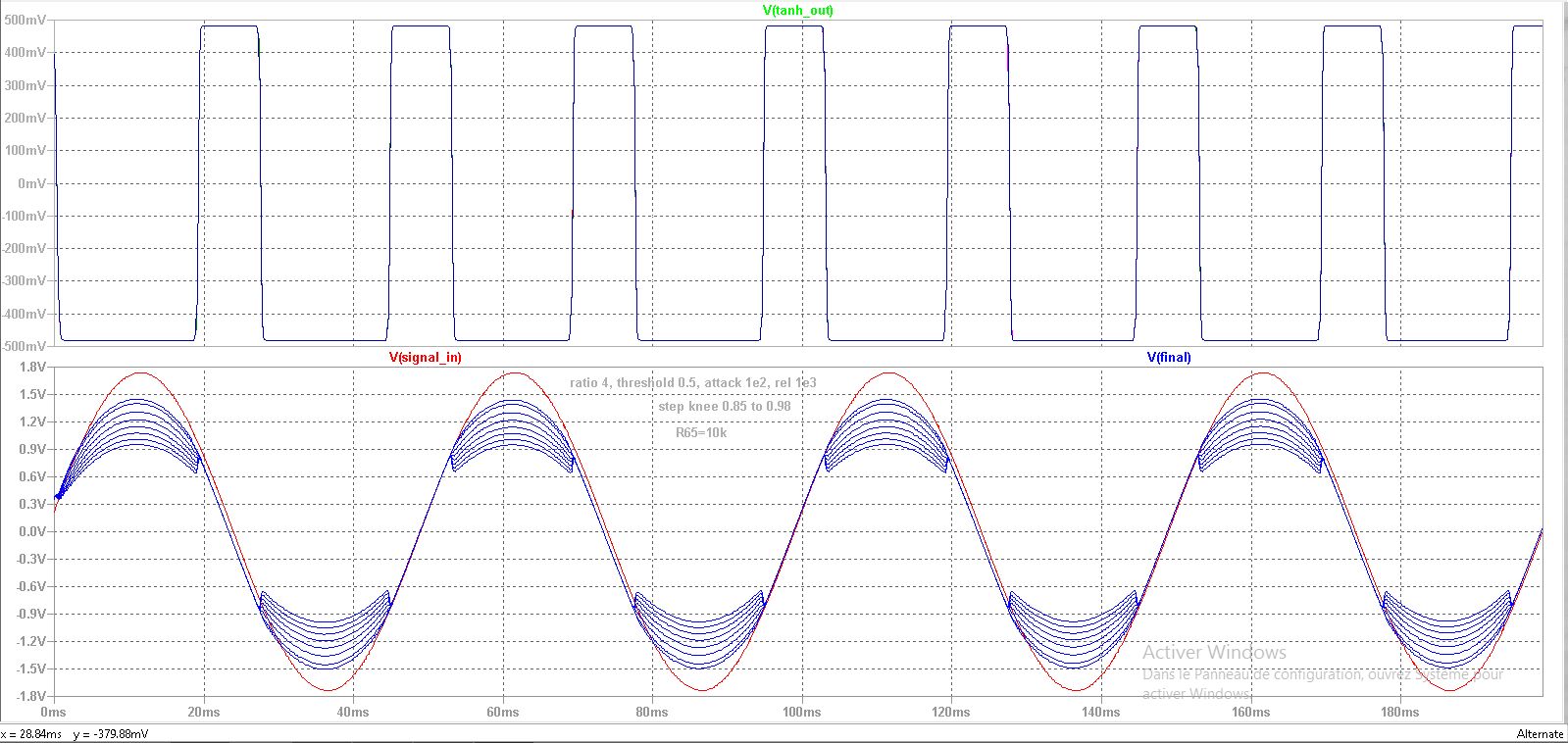
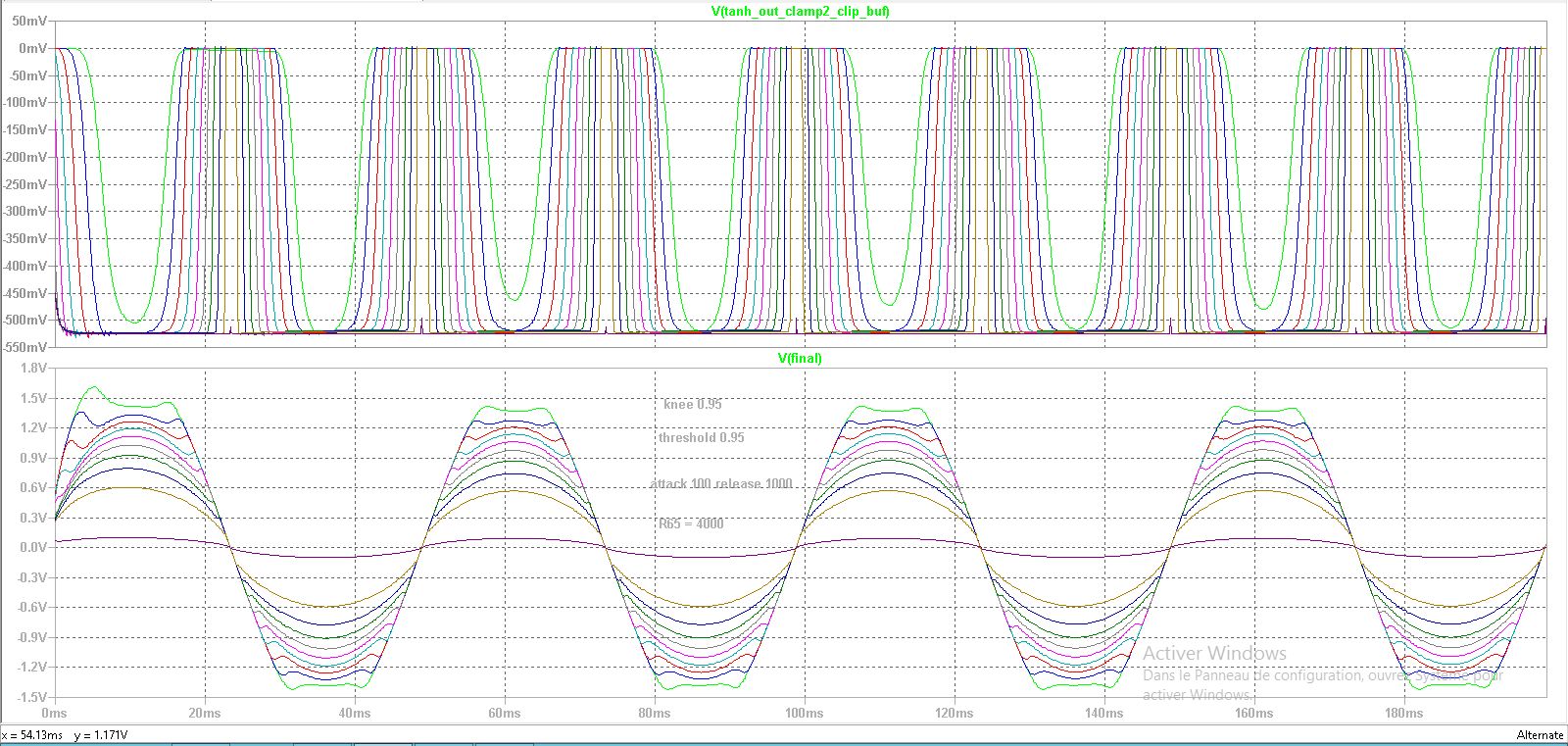
Figure 2 : The second plot uses the same parameter stepping with a higher input gain to the tanh() cell, setting resistor R65 to 10k. The overall gain response is more or less the same for small knee widths, while larger knee widths exhibit a dramatic distortion effect.
Figure 2 : stepping the knee width, R65=10k
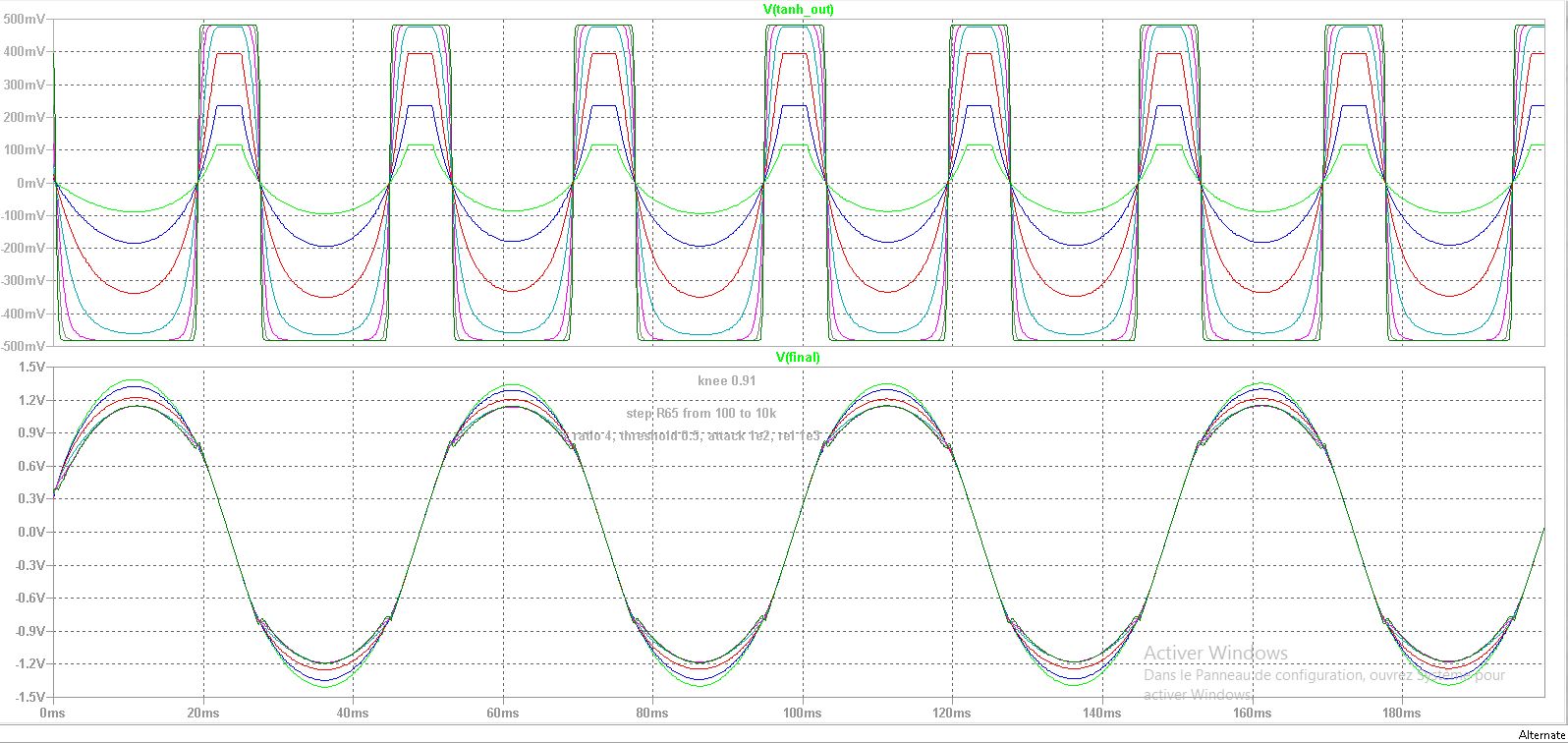
Figure 3, We stepped the tanh() cell input gain resistor. the knee inversion from soft to “hardcore” is clearly visible
Figure 3 : stepping tanh() cell input gain
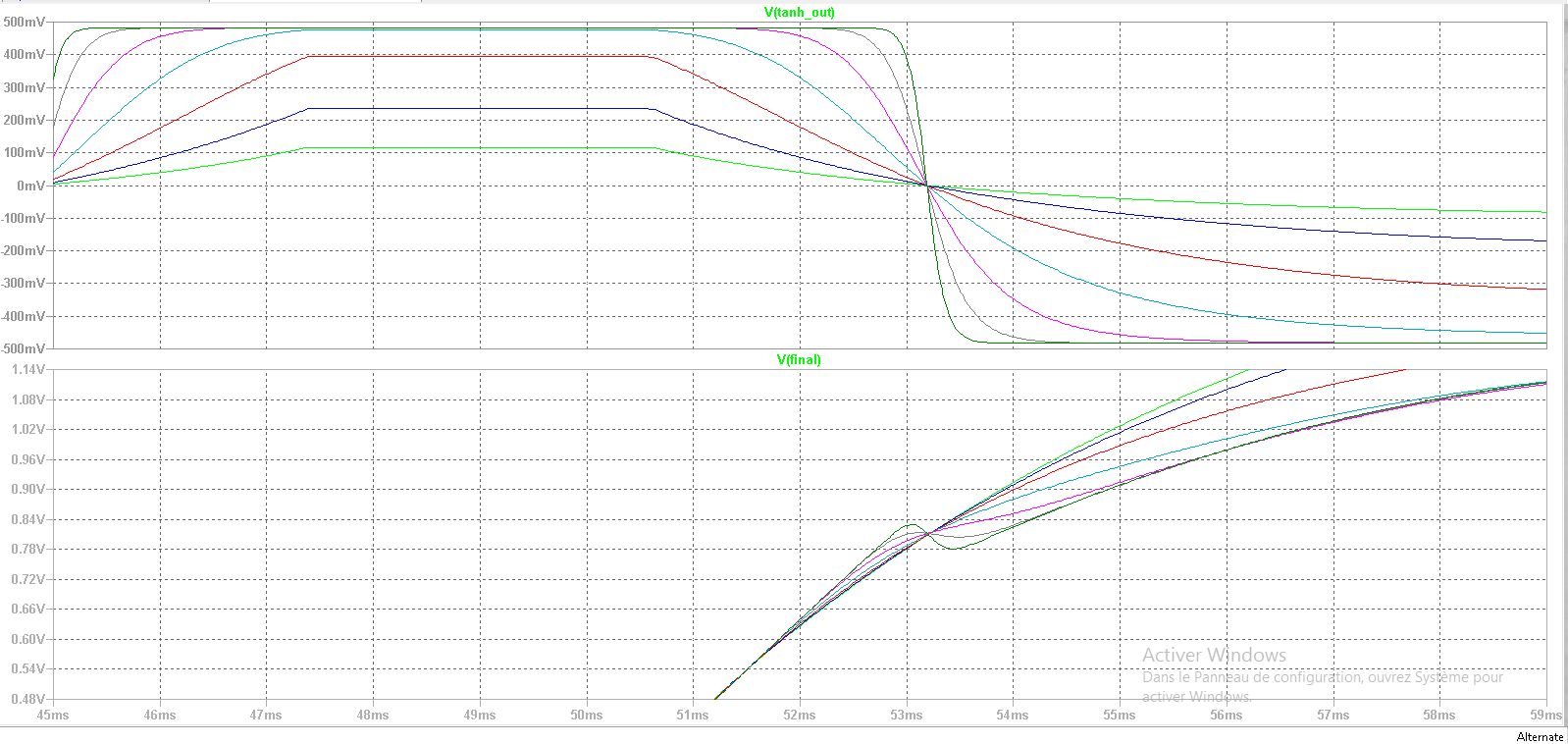
Figure 4 : Zooming in on the previous figure to show knee inversion clearly :
Figure 4 : Effect of tanh() cell input gain. We can see knee inversions but also soft knees.
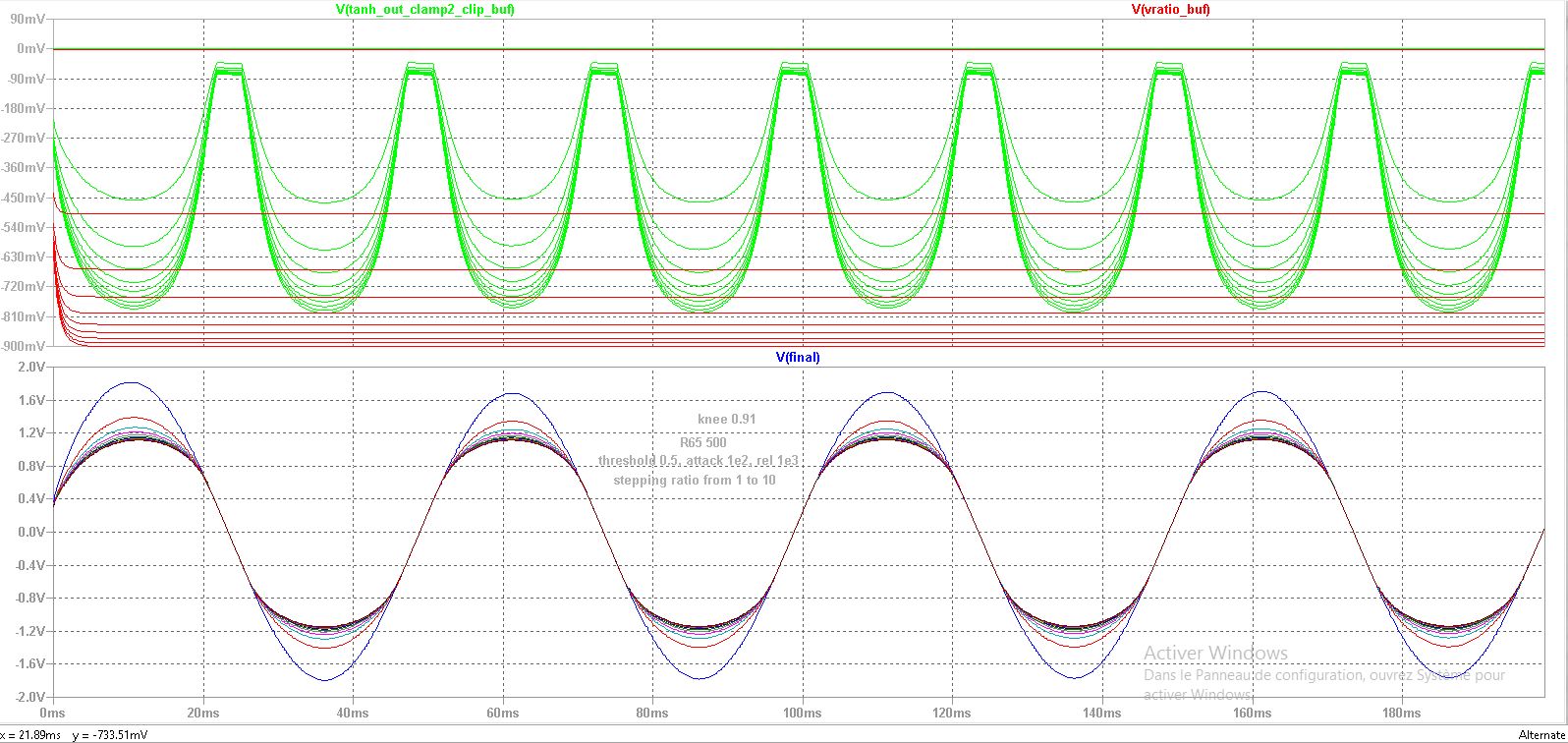
Figure 5 : We step the ratio from 1 to 10 by increments of 1 to show a more classic compressor behavior. The R65 resistor is set at 500 so the tanh() cell is not saturated. Gain reduction seems to hit a hard limit before reaching to effective ratio of 10. The compressor shows and effective ratio of 1.56 where it should be 2, 2.10 where it should be 6, and 2.23 where it should be 10. The gain computer works on a logarithmic signal, but the THAT2180 IC is an exponential control IC, that is, it expects dB input, so the result should be linear. We will have to investigate this. Part of the problem is due to the tanh() cell not being saturated but that does not explain such low effective ratios.
Figure 5 : Effect of ratio on signal, unsaturated tanh() cell
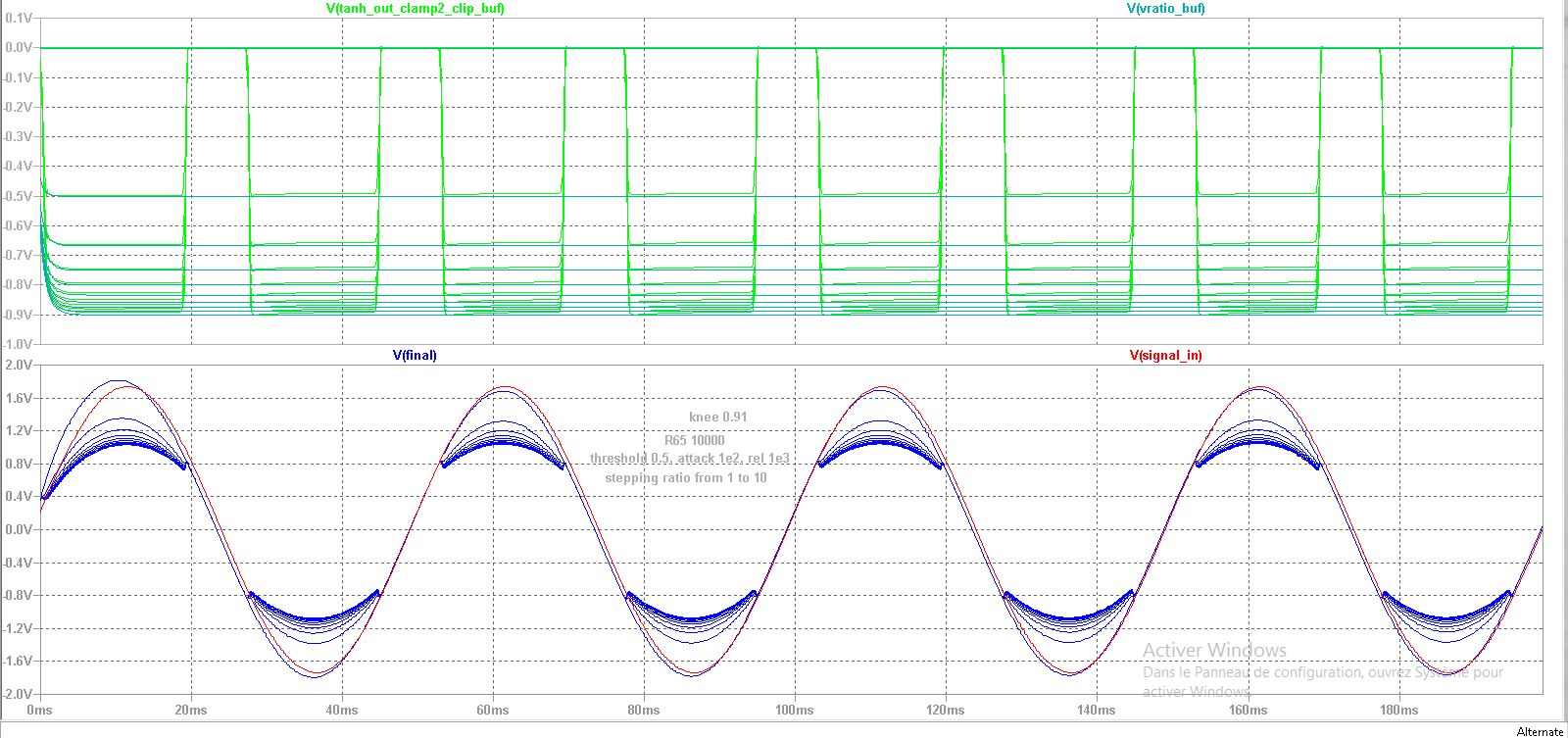
Figure 6 : Same problem. We will have to check the R26 value that sets the U37 gain used in the final gain normalization stage. Also maybe a diode voltage drop was not accounted for. in the A/R stage. The best would be to set an acceptable knee width (not too small to prevent inversions) and not too big to lower the ratio, Set a high ratio, and perform calibration by selecting a better value for R26 and then re-check compression for a ratio of 2. Fortunately, unit ratio results in a more or less identical signal which means that there is probably not any unaccounted offset in the gain/knee computers.
Figure 7: Effect of ratio on compression using R65 = 10k
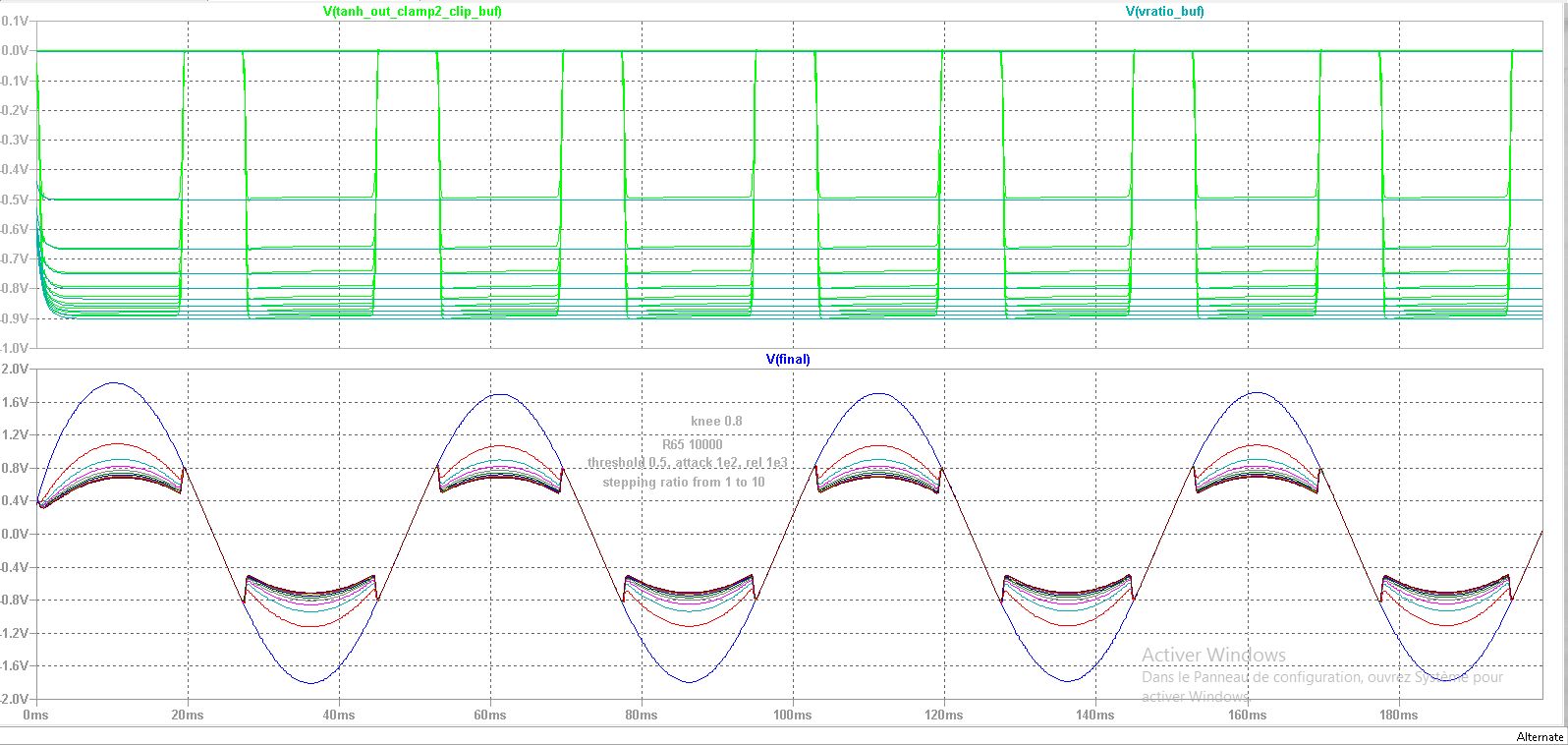
Now in Figure 8, we see an adequate ratio using a knee of 0.8 but at the expense of a very hard knee and signal distortion, because of that, the signal appears to have high compression because of that offset. In reality, it is more like a higher compression obtained through lowering the threshold (which the knee setting does)
Figure 8. effect of ratio on compression. Kneewidth setting 0.8
In the end, the sensible solution was to recalibrate the final gain normalization op-amp, at the maximum rated compression level, let’s a ratio of 20, so that the (linear) ratio of the output of the non-processed signal above the threshold to the output of the processed signal above the threshold is roughly equal to 20, This is done while setting other parameters to midrange values the threshold to -6dB. This was done with the knee-width computer disconnected, and R55 connected to ground instead. In the end, we set the R26 resistor value to 35k instead of 20.8k for theory.
Next, We set the ratio back to 1 and reconnect the knee width computer since he is responsible for applying the ratio. We check that both amplitudes of the input and output signal match. The small discrepancies are probably from the VCA824’s small remaining offsets.
The process would then need to compute the ratios at step intervals and mark the potentiometer accordingly.
Figure 9: It’s much better now ! The potentiometer pot also has been replaced by an exponential pot to allow finer resolution for low profiles.
Figure 9. Effect of ratio on compression after calibration and using an exponential tap pot with linear stepping
This is the model for the exponential pot that I used :